-
- Downloads
Initialized site documentation.
Showing
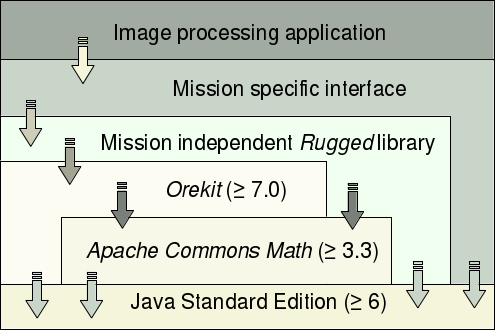
- src/site/resources/images/rugged-architecture.png 0 additions, 0 deletionssrc/site/resources/images/rugged-architecture.png
- src/site/resources/images/rugged-logo.png 0 additions, 0 deletionssrc/site/resources/images/rugged-logo.png
- src/site/site.xml 5 additions, 23 deletionssrc/site/site.xml
- src/site/xdoc/changes.xml 488 additions, 0 deletionssrc/site/xdoc/changes.xml
{kind=link}
31.8 KiB
src/site/resources/images/rugged-logo.png
0 → 100644
{kind=link}
31.9 KiB
src/site/xdoc/changes.xml
0 → 100644