Showing
- src/site/markdown/downloads.md.vm 98 additions, 0 deletionssrc/site/markdown/downloads.md.vm
- src/site/markdown/faq.md 35 additions, 20 deletionssrc/site/markdown/faq.md
- src/site/markdown/guidelines.md 76 additions, 27 deletionssrc/site/markdown/guidelines.md
- src/site/markdown/index.md 32 additions, 29 deletionssrc/site/markdown/index.md
- src/site/markdown/release-guide.md 394 additions, 0 deletionssrc/site/markdown/release-guide.md
- src/site/markdown/sources.md 34 additions, 21 deletionssrc/site/markdown/sources.md
- src/site/markdown/tutorials/direct-location-with-DEM.md 35 additions, 11 deletionssrc/site/markdown/tutorials/direct-location-with-DEM.md
- src/site/markdown/tutorials/direct-location.md 19 additions, 9 deletionssrc/site/markdown/tutorials/direct-location.md
- src/site/markdown/tutorials/inverse-location.md 44 additions, 9 deletionssrc/site/markdown/tutorials/inverse-location.md
- src/site/markdown/tutorials/matlab-example.md 25 additions, 0 deletionssrc/site/markdown/tutorials/matlab-example.md
- src/site/markdown/tutorials/tile-updater.md 1 addition, 1 deletionsrc/site/markdown/tutorials/tile-updater.md
- src/site/resources/images/logo_cs_2008_baseline_ang.jpg 0 additions, 0 deletionssrc/site/resources/images/logo_cs_2008_baseline_ang.jpg
- src/site/resources/images/logo_cs_group.png 0 additions, 0 deletionssrc/site/resources/images/logo_cs_group.png
- src/site/resources/images/orekit-logo.png 0 additions, 0 deletionssrc/site/resources/images/orekit-logo.png
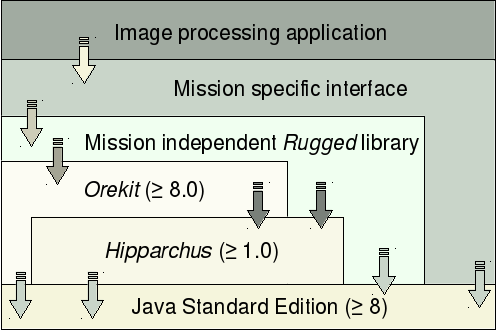
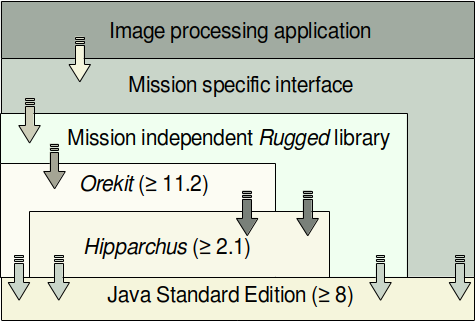
- src/site/resources/images/rugged-architecture.odg 0 additions, 0 deletionssrc/site/resources/images/rugged-architecture.odg
- src/site/resources/images/rugged-architecture.png 0 additions, 0 deletionssrc/site/resources/images/rugged-architecture.png
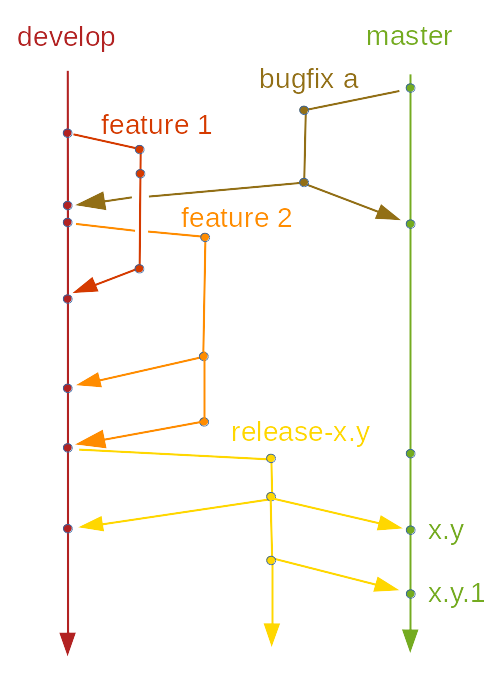
- src/site/resources/images/rugged-git-flow.odg 0 additions, 0 deletionssrc/site/resources/images/rugged-git-flow.odg
- src/site/resources/images/rugged-git-flow.png 0 additions, 0 deletionssrc/site/resources/images/rugged-git-flow.png
- src/site/resources/images/rugged-logo-small.jpg 0 additions, 0 deletionssrc/site/resources/images/rugged-logo-small.jpg
- src/site/resources/images/rugged-logo.jpg 0 additions, 0 deletionssrc/site/resources/images/rugged-logo.jpg
src/site/markdown/release-guide.md
0 → 100644
{kind=link}
31.6 KiB
src/site/resources/images/logo_cs_group.png
0 → 100644
{kind=link}
19.1 KiB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
File added
{kind=link}
{kind=link}
| W: | H:
| W: | H:
File added
{kind=link}
43.3 KiB
{kind=link}
13.4 KiB
src/site/resources/images/rugged-logo.jpg
0 → 100644
{kind=link}
48.6 KiB