Showing
- src/site/markdown/guidelines.md 237 additions, 0 deletionssrc/site/markdown/guidelines.md
- src/site/markdown/index.md 115 additions, 0 deletionssrc/site/markdown/index.md
- src/site/markdown/release-guide.md 394 additions, 0 deletionssrc/site/markdown/release-guide.md
- src/site/markdown/sources.md 55 additions, 0 deletionssrc/site/markdown/sources.md
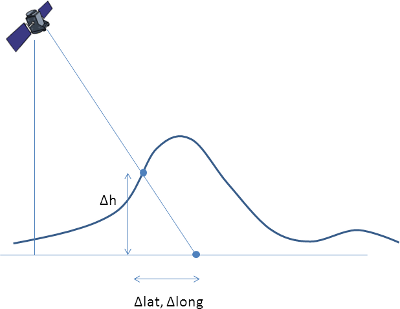
- src/site/markdown/tutorials/direct-location-with-DEM.md 196 additions, 0 deletionssrc/site/markdown/tutorials/direct-location-with-DEM.md
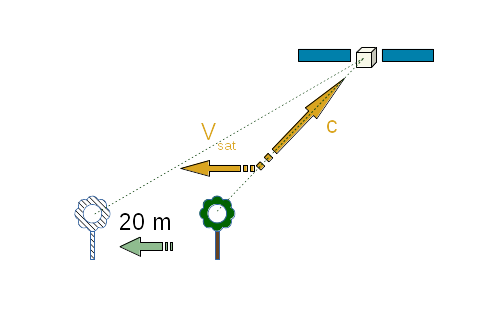
- src/site/markdown/tutorials/direct-location.md 327 additions, 0 deletionssrc/site/markdown/tutorials/direct-location.md
- src/site/markdown/tutorials/inverse-location.md 89 additions, 0 deletionssrc/site/markdown/tutorials/inverse-location.md
- src/site/markdown/tutorials/matlab-example.md 25 additions, 0 deletionssrc/site/markdown/tutorials/matlab-example.md
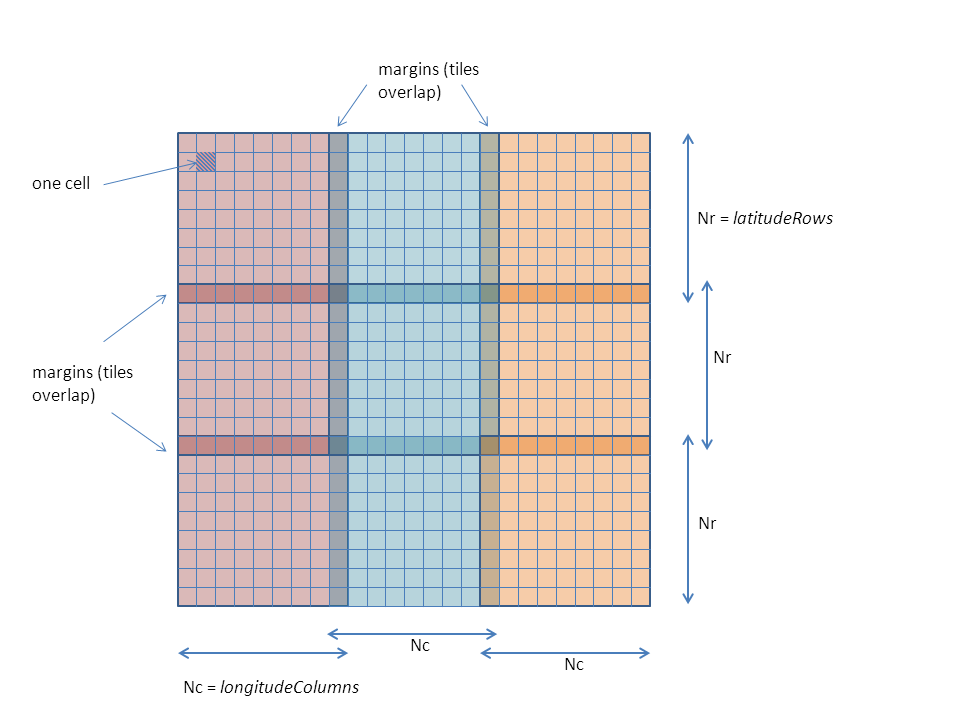
- src/site/markdown/tutorials/tile-updater.md 14 additions, 0 deletionssrc/site/markdown/tutorials/tile-updater.md
- src/site/resources/images/DEM-tiles-overlap.png 0 additions, 0 deletionssrc/site/resources/images/DEM-tiles-overlap.png
- src/site/resources/images/Earth_FlatVsRugged.gif 0 additions, 0 deletionssrc/site/resources/images/Earth_FlatVsRugged.gif
- src/site/resources/images/RuggedExplained.png 0 additions, 0 deletionssrc/site/resources/images/RuggedExplained.png
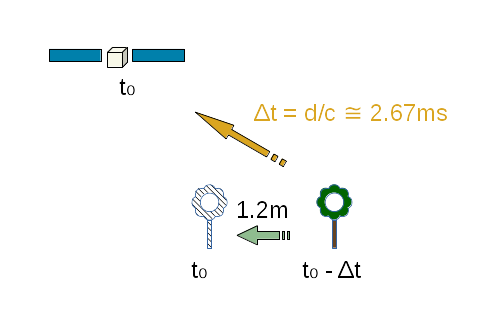
- src/site/resources/images/aberration-of-light-correction.png 0 additions, 0 deletionssrc/site/resources/images/aberration-of-light-correction.png
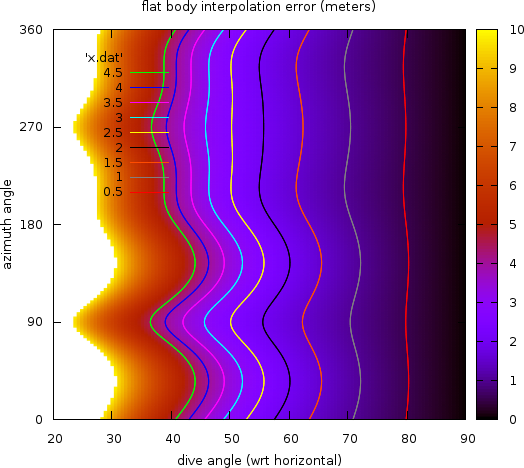
- src/site/resources/images/flat-body-interpolation-error.png 0 additions, 0 deletionssrc/site/resources/images/flat-body-interpolation-error.png
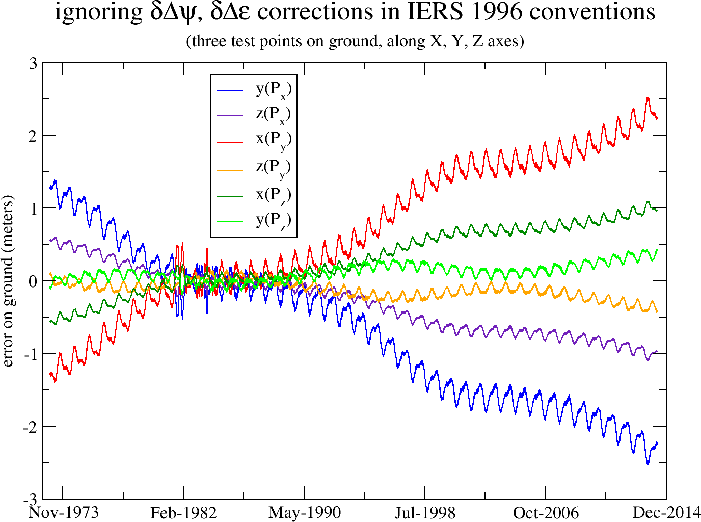
- src/site/resources/images/ignoring-EOP-1996.png 0 additions, 0 deletionssrc/site/resources/images/ignoring-EOP-1996.png
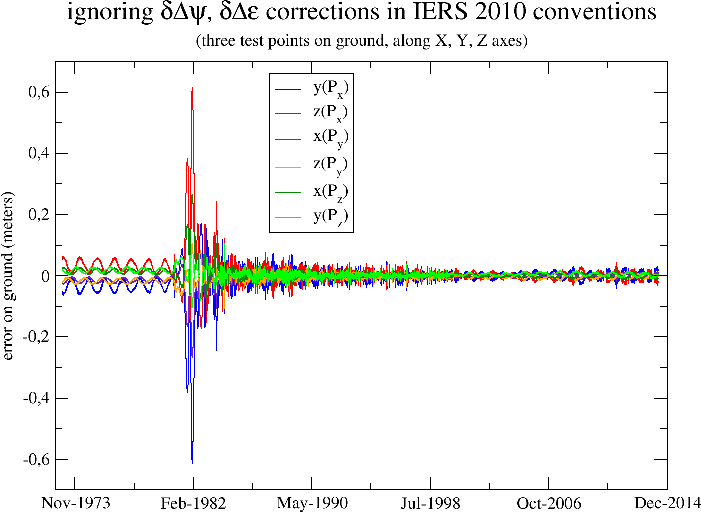
- src/site/resources/images/ignoring-EOP-2010.png 0 additions, 0 deletionssrc/site/resources/images/ignoring-EOP-2010.png
- src/site/resources/images/light-time-correction.png 0 additions, 0 deletionssrc/site/resources/images/light-time-correction.png
- src/site/resources/images/logo_cs_group.png 0 additions, 0 deletionssrc/site/resources/images/logo_cs_group.png
- src/site/resources/images/orekit-logo.png 0 additions, 0 deletionssrc/site/resources/images/orekit-logo.png
- src/site/resources/images/rugged-architecture.odg 0 additions, 0 deletionssrc/site/resources/images/rugged-architecture.odg
src/site/markdown/guidelines.md
0 → 100644
src/site/markdown/index.md
0 → 100644
src/site/markdown/release-guide.md
0 → 100644
src/site/markdown/sources.md
0 → 100644
src/site/markdown/tutorials/tile-updater.md
0 → 100644
{kind=link}
9.2 KiB
{kind=link}
86.8 KiB
{kind=link}
15.2 KiB
{kind=link}
26 KiB
{kind=link}
137 KiB
{kind=link}
15.3 KiB
{kind=link}
11.6 KiB
{kind=link}
24.1 KiB
src/site/resources/images/logo_cs_group.png
0 → 100644
{kind=link}
19.1 KiB
src/site/resources/images/orekit-logo.png
0 → 100644
{kind=link}
21.4 KiB
File added