Showing
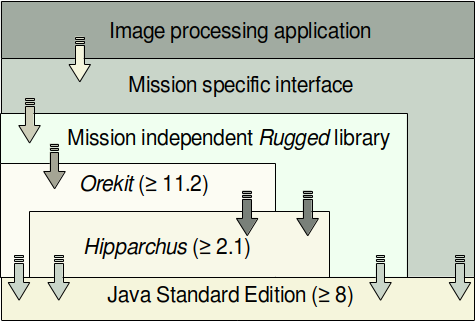
- src/site/resources/images/rugged-architecture.png 0 additions, 0 deletionssrc/site/resources/images/rugged-architecture.png
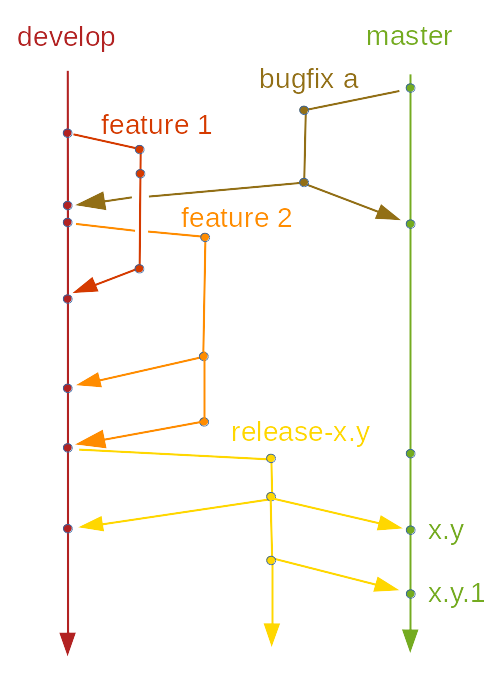
- src/site/resources/images/rugged-git-flow.odg 0 additions, 0 deletionssrc/site/resources/images/rugged-git-flow.odg
- src/site/resources/images/rugged-git-flow.png 0 additions, 0 deletionssrc/site/resources/images/rugged-git-flow.png
- src/site/resources/images/rugged-logo-small.jpg 0 additions, 0 deletionssrc/site/resources/images/rugged-logo-small.jpg
- src/site/resources/images/rugged-logo.jpg 0 additions, 0 deletionssrc/site/resources/images/rugged-logo.jpg
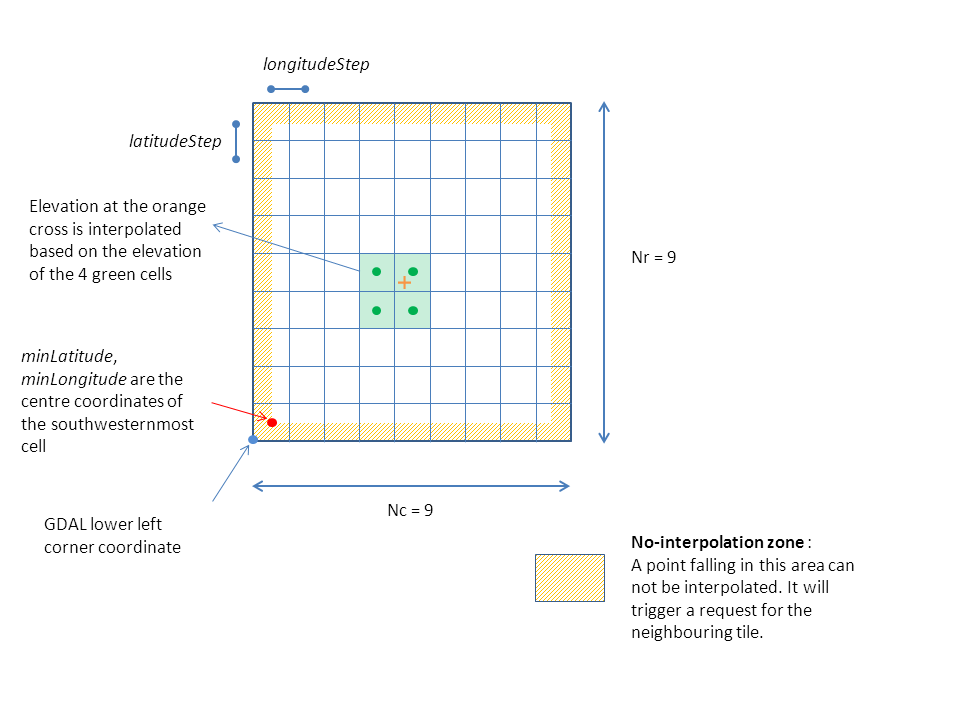
- src/site/resources/images/tile-description.png 0 additions, 0 deletionssrc/site/resources/images/tile-description.png
- src/site/resources/sources/matlab-examples/.gitkeep 0 additions, 0 deletionssrc/site/resources/sources/matlab-examples/.gitkeep
- src/site/resources/sources/matlab-examples/DirectLocation.m 167 additions, 0 deletionssrc/site/resources/sources/matlab-examples/DirectLocation.m
- src/site/resources/sources/matlab-examples/InverseLocation.m 183 additions, 0 deletionssrc/site/resources/sources/matlab-examples/InverseLocation.m
- src/site/resources/sources/matlab-examples/dim2rugged.m 337 additions, 0 deletionssrc/site/resources/sources/matlab-examples/dim2rugged.m
- src/site/site.xml 66 additions, 0 deletionssrc/site/site.xml
- src/test/java/org/orekit/rugged/TestUtils.java 402 additions, 0 deletionssrc/test/java/org/orekit/rugged/TestUtils.java
- src/test/java/org/orekit/rugged/adjustment/AdjustmentContextTest.java 198 additions, 0 deletions...a/org/orekit/rugged/adjustment/AdjustmentContextTest.java
- src/test/java/org/orekit/rugged/adjustment/GroundOptimizationProblemBuilderTest.java 200 additions, 0 deletions...gged/adjustment/GroundOptimizationProblemBuilderTest.java
- src/test/java/org/orekit/rugged/adjustment/InterSensorOptimizationProblemBuilderTest.java 349 additions, 0 deletions...adjustment/InterSensorOptimizationProblemBuilderTest.java
- src/test/java/org/orekit/rugged/adjustment/LeastSquareAdjusterTest.java 27 additions, 0 deletions...org/orekit/rugged/adjustment/LeastSquareAdjusterTest.java
- src/test/java/org/orekit/rugged/adjustment/util/InitGroundRefiningTest.java 256 additions, 0 deletions...orekit/rugged/adjustment/util/InitGroundRefiningTest.java
- src/test/java/org/orekit/rugged/adjustment/util/InitInterRefiningTest.java 561 additions, 0 deletions.../orekit/rugged/adjustment/util/InitInterRefiningTest.java
- src/test/java/org/orekit/rugged/adjustment/util/PleiadesOrbitModel.java 198 additions, 0 deletions...org/orekit/rugged/adjustment/util/PleiadesOrbitModel.java
- src/test/java/org/orekit/rugged/adjustment/util/PleiadesViewingModel.java 141 additions, 0 deletions...g/orekit/rugged/adjustment/util/PleiadesViewingModel.java
{kind=link}
35.5 KiB
File added
{kind=link}
43.3 KiB
{kind=link}
13.4 KiB
src/site/resources/images/rugged-logo.jpg
0 → 100644
{kind=link}
48.6 KiB
{kind=link}
14.9 KiB
src/site/site.xml
0 → 100644