-
- Downloads
Updated tutorials from forge wiki.
Showing
- src/site/markdown/tutorials/direct-location-with-DEM.md 165 additions, 0 deletionssrc/site/markdown/tutorials/direct-location-with-DEM.md
- src/site/markdown/tutorials/direct-location.md 32 additions, 35 deletionssrc/site/markdown/tutorials/direct-location.md
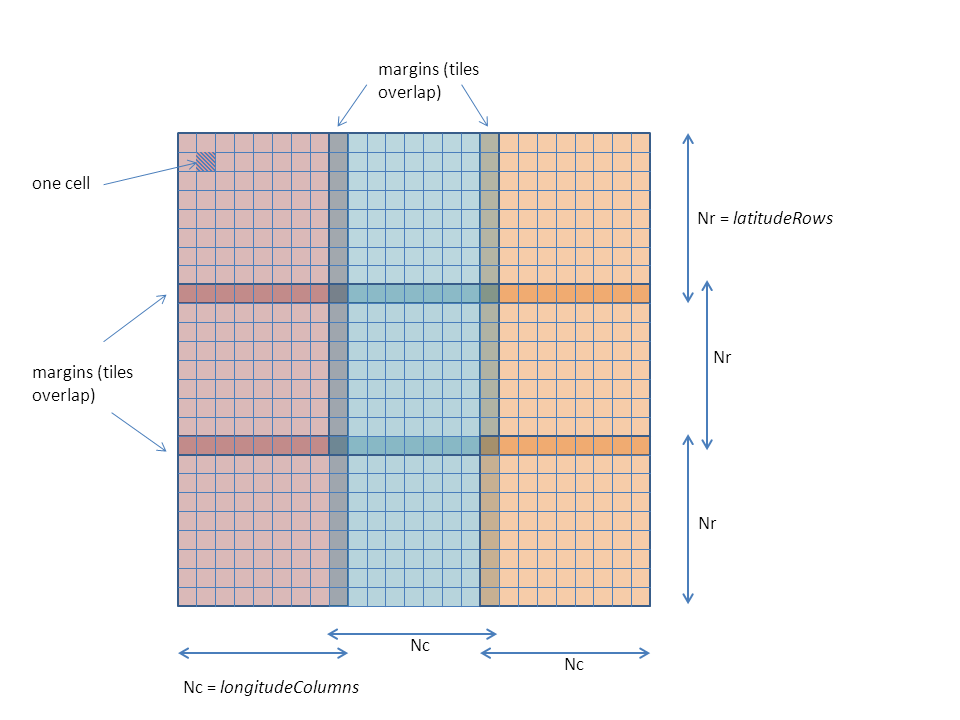
- src/site/resources/images/DEM-tiles-overlap.png 0 additions, 0 deletionssrc/site/resources/images/DEM-tiles-overlap.png
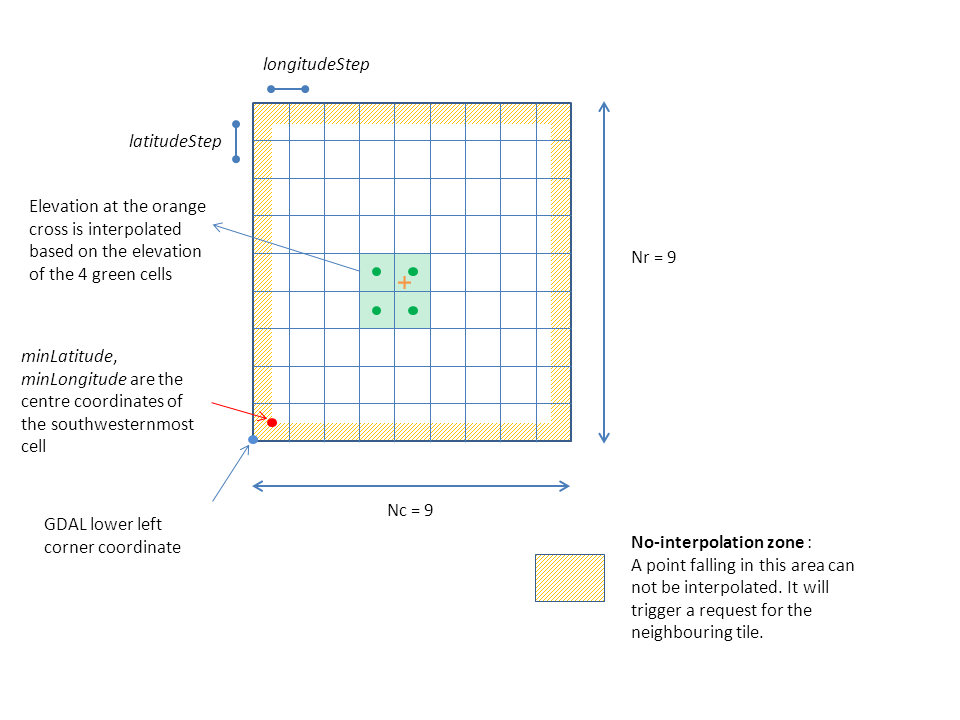
- src/site/resources/images/tile-description.png 0 additions, 0 deletionssrc/site/resources/images/tile-description.png
- src/site/site.xml 18 additions, 17 deletionssrc/site/site.xml
{kind=link}
9.2 KiB
{kind=link}
14.9 KiB