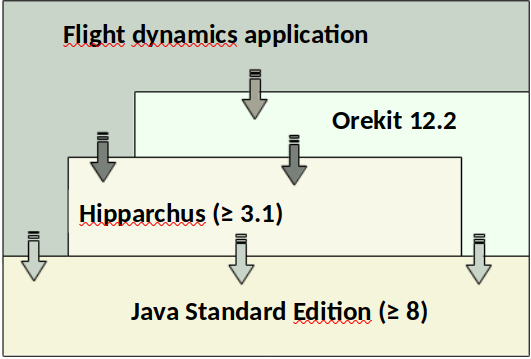
The Orekit team is pleased to announce the release of Orekit version 12.2.
This is a minor release of Orekit, including new features and bug fixes.
Main changes are:
* Introduction of indirect optimal control
* Adjoint equations as defined by Pontryagin's Maximum Principle with Cartesian coordinates for a range of forces: (gravitational, inertial) including J2
* So-called energy cost functions (proportional to the integral of the control vector's squared norm), with Hamitonian evaluation
* Single shooting based on Newton algorithm for the case of fixed time, fixed Cartesian bounds
* Attitude
* Implementation of attitude provider with primary target and secondary constraint
* Data parsing
* Implementation of a parser for GRGM1200B-like gravity models
* Noticeable bug fixes
* Use proper body-fixed (ITRF) frame in DSST zonal (see [Issue 1104](https://gitlab.orekit.org/orekit/orekit/-/issues/1104))
* A long standing bug on the Brouwer-Lyddane model has been fixed (see [Issue 947](https://gitlab.orekit.org/orekit/orekit/-/issues/947))
* Miscelleneous
* Impulsive maneuvers can now be added to relevant `PropagatorBuilder`
*`PropagatorBuilder` are now cloneable
* Closing gap in implemented methods between classes and their field equivalent
* Implementation of several quality of life methods
<li>inter-satellites range (one way and two way)</li>
<li>inter-satellites range (one way and two way)</li>
<li>inter-satellites GNSS one way range rate</li>
<li>inter-satellites GNSS phase</li>
<li>inter-satellites GNSS phase</li>
<li>Time Difference of Arrival (TDOA)</li>
<li>Time Difference of Arrival (TDOA)</li>
<li>Frequency Difference of Arrival (FDOA)</li>
<li>Frequency Difference of Arrival (FDOA)</li>
...
@@ -387,6 +389,7 @@ layout: default_orekit
...
@@ -387,6 +389,7 @@ layout: default_orekit
<li>biases</li>
<li>biases</li>
<li>delays</li>
<li>delays</li>
<li>Antenna Phase Center</li>
<li>Antenna Phase Center</li>
<li>Phase ambiguity</li>
<li>Shapiro relativistic effect</li>
<li>Shapiro relativistic effect</li>
<li>aberration of light in telescope measurements</li>
<li>aberration of light in telescope measurements</li>
</ul>
</ul>
...
@@ -469,6 +472,13 @@ layout: default_orekit
...
@@ -469,6 +472,13 @@ layout: default_orekit
<li>construction of trajectories using loxodromes (commonly, a rhumb line)</li>
<li>construction of trajectories using loxodromes (commonly, a rhumb line)</li>
</ul>
</ul>
<h2>Indirect optimal control</h2>
<ul>
<li>adjoint equations as defined by Pontryagin's Maximum Principle with Cartesian coordinates for a range of forces (gravitational, inertial) including J2</li>
<li>so-called energy cost functions (proportional to the integral of the control vector's squared norm), with Hamiltonian evaluation</li>
<li>single shooting based on Newton algorithm for the case of fixed time, fixed Cartesian bounds</li>
{kind=link}
{kind=link}